发布时间:2023-09-07
本届复杂交通场景通信与感知算法挑战赛将发布城镇十字路口场景及山区公路场景的混合通信与多模态感知仿真数据集供选手使用。
数据集利用了Wireless InSite仿真软件来采集无线通信信道数据。通信频段包含了毫米波频段(28 GHz)和sub-6 GHz频段(5.9 GHz)。为了采集多模态感知数据,我们利用了3D游戏引擎Unreal Engine®、AirSim仿真软件。其中,路端和车端均搭载了多模态感知设备,包括RGB相机、深度相机和激光雷达。数据集中的无线通信信道数据和多模态感知数据均包含了多车和多路端信息,涵盖了多种天气条件,即晴天、雨天和雪天,并覆盖了中、高不同车流量密度。
一、各赛题数据集下载链接
赛题一:网联协同信道大尺度衰落预测
https://pan.baidu.com/s/1I9WsTDPWmdXgnDfU2QM52w,提取码:x7yx
如遇到问题,请联系:黄子蔚 ziweihuang@pku.edu.cn
赛题二:车路协同高效波束预测方案设计
https://pan.baidu.com/s/14m-yKWNIPnh7xWavtAV_Kg,提取码:8gsf
其中docx文件为数据集说明文档,对相关数据的仿真参数和使用进行了描述,供选手参考。
如遇到问题,请联系:张浩天 haotianzhang@stu.pku.edu.cn
(已补充晴天高车流量密度场景训练数据)
赛题三:异常数据条件下车辆协同定位
https://pan.baidu.com/s/1ONqZ25TzZ0DjipFF3QeHiw?pwd=xw2p,提取码:xw2p
其中Documents文件夹包含了数据集说明文档,对相关数据的仿真参数和使用进行了描述,供选手参考。
如遇到问题,请联系:李思江 pkulsj@pku.edu.cn
【9月26日更新】赛题三车辆轨迹真值文件有重要更新,请点击链接,查看ReadMe文件了解详细信息。
【11月3日更新】 赛题三山区公路场景车辆轨迹和RSF坐标真值文件有重要修正,请点击数据集链接,查看Documents文件夹下ReadMe文件了解详细信息。
注:目前开放下载的数据集均为训练(验证)集,各参赛队伍可根据需要使用。测试集将于10月15日发布。
二、文件格式说明
l RGB图像文件(png格式)
l 深度图像文件(png格式)
l 激光雷达点云文件(txt格式)
每行为一个浮点数,每3行为一组,依次代表一个点的三维坐标(x,y,z)
l 赛题一:路径损耗真值文件(txt格式)
内容为指定发射端和接收端每个天线之间的路径损耗数据,单位为dB,浮点值,第一行是发射端名称,其他为路径损耗数值
l 赛题二:位置数据文件(position.txt)
内容依次为车辆x轴坐标和y轴坐标,浮点值,用空格分隔
l 赛题二:波束序号文件(beam_index.txt)
内容依次为接收信噪比从高到低的前三个波束对应的码本序号,为1-128的整数值,用空格分隔
l 赛题三:轨迹真值文件(txt格式)
内容为Nx6的车辆位姿信息,每一行内容依次为x y z坐标,以及roll pitch yaw角度(角度单位为弧度)
l 赛题三:信道状态信息文件(mat格式)
内容为32行128列的信道复增益矩阵,每行依次对应Tx端1-32号天线,每列依次对应Rx端1-128号天线
三、各赛题文件夹目录说明
赛题一:网联协同信道大尺度衰落预测
赛题一中数据的文件夹共包含了RGB,Depth_map,LiDAR和Pathloss四个子文件夹,每个文件夹中包含了五种场景条件下的数据:(a)sunny_mmWave_mediumVTD,(b)rainy_mmWave_mediumVTD,(c)snowy_mmWave_mediumVTD,(d)sunny_mmWave_highVTD、(e)sunny_sub6_mediumVTD。文件目录树状图如图1所示。
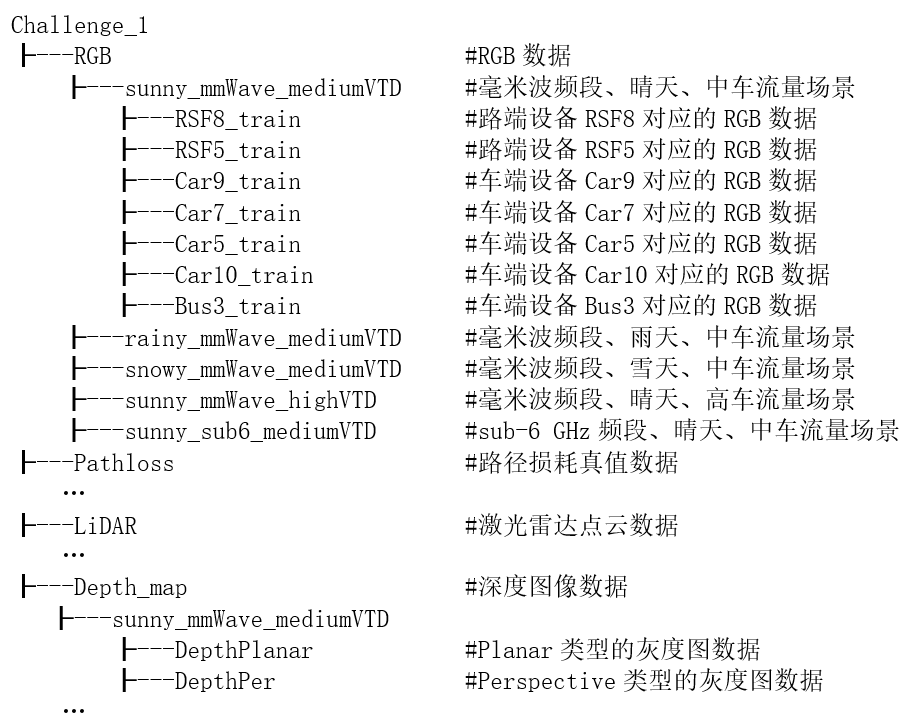
图1 赛题一文件夹目录
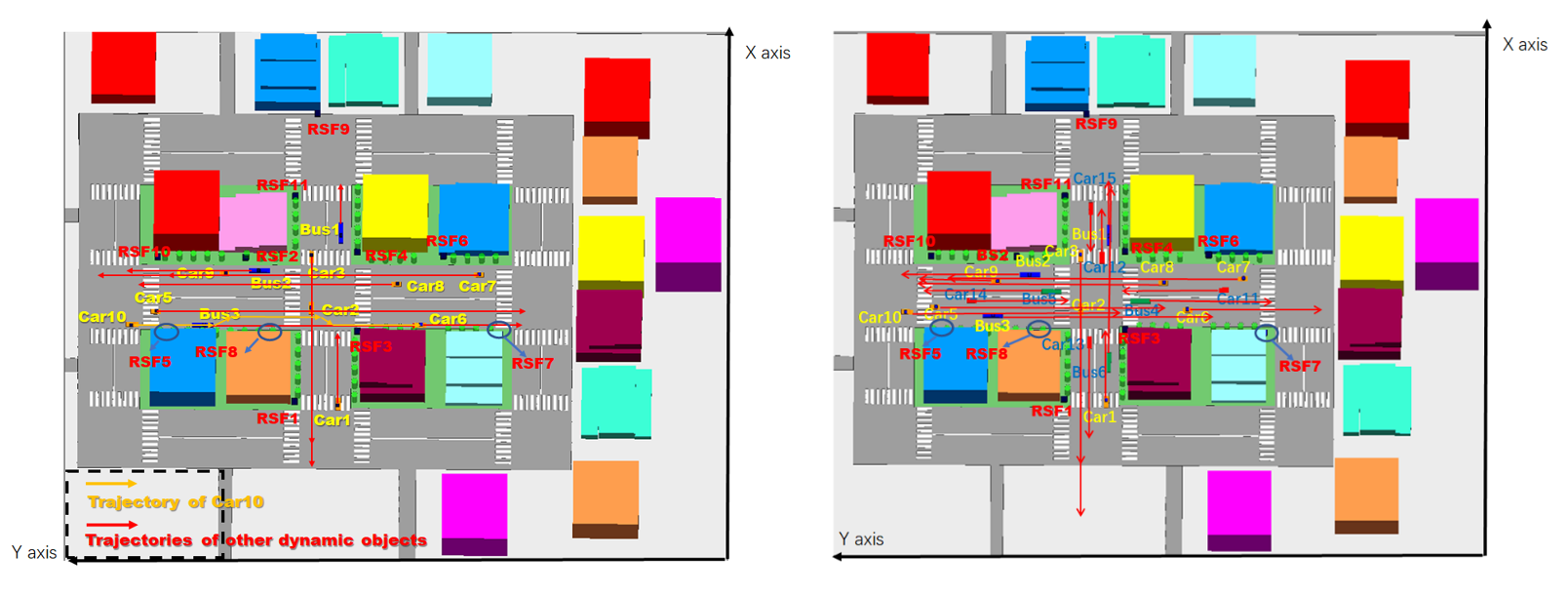
图2 赛题一中车流量车辆轨迹和路端设备位置示意图 图3 赛题一高车流量车辆轨迹和路端设备位置示意图
赛题二:车路协同高效波束预测方案设计
赛题二中的数据文件夹共有四级目录,如图4所示;每个场景涵盖的具体链路信息请参考图5。为了选手更好地利用“position.txt”中的车辆位置信息,图6和图7分别给出了中车流量密度场景和高车流量密度场景的车辆轨迹和路端设备位置俯瞰图,路端设备的具体位置信息在图8中给出。
值得注意的是,四种场景条件的测试集(将于10月15日发布)中均涵盖了“训练集中极少出现”的路端设备多模态数据(约占测试集的30%),以考察选手所设计模型在不同路端设备上的泛化性。例如,中车流量晴天的“BS6_Car7”链路,帧数为1-320时刻的样本作为训练集提供给选手,帧数为321-1000时刻的样本作为“训练集中极少出现”的测试集样本用于测试选手设计的模型。
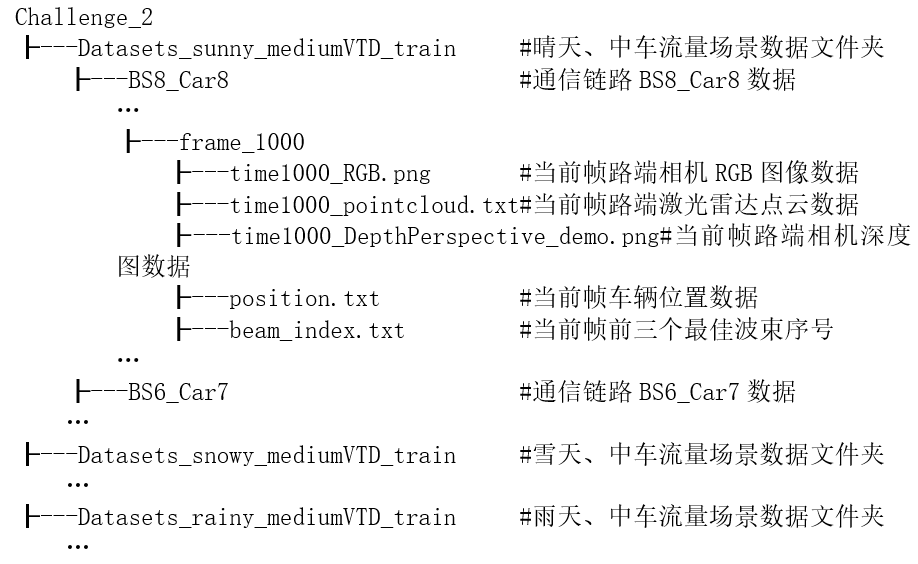
图4 赛题二文件夹目录

图5 四种场景涵盖的具体通信链路信息
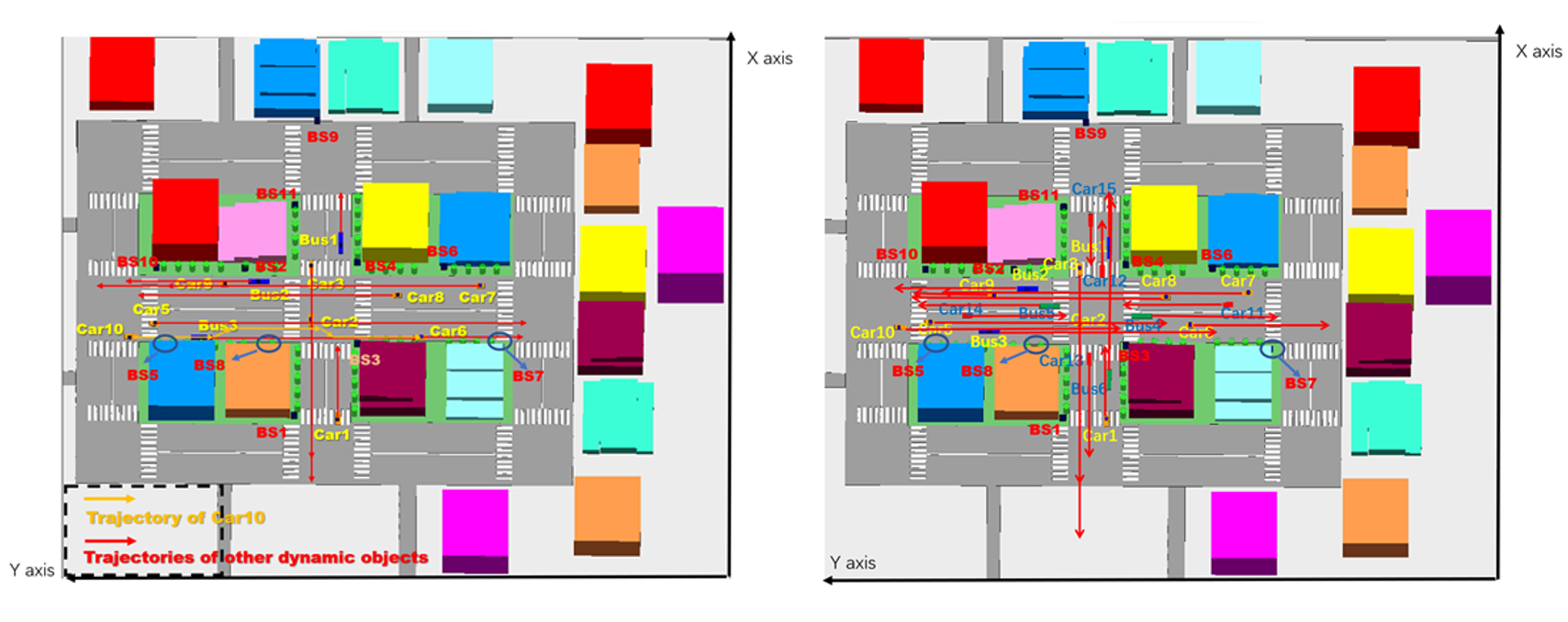
图6 中车流量场景的车辆轨迹和路端设备位置示意图 图7 高车流量场景的车辆轨迹和路端设备位置示意图
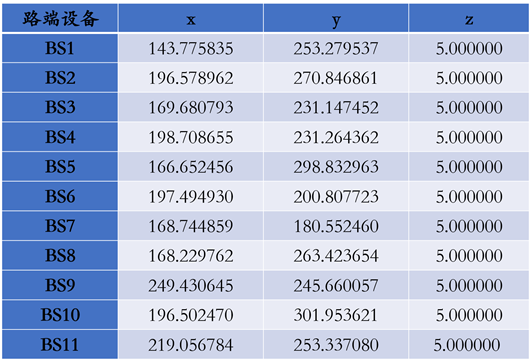
图8 中车流量密度/高车流量密度场景中路端设备的位置(注:所提供的坐标是通信设备的位置,路端设备上通信设备和感知设备之间会有一定的距离间隔)
赛题三:异常数据条件下车辆协同定位
赛题三的数据集共分为五个场景文件夹,每一场景文件夹下分别存有各个车辆以及路端的通信与多模态感知数据。其中,前三个场景文件夹为十字路口场景,分别为晴天场景、雪天场景以及数据残缺场景,数据残缺场景具体是指传感器数据会在某些时刻缺失一定的帧数,需要选手在设计算法时需要考虑应对此类问题的鲁棒性。后两个场景文件夹为山区公路场景,分别对应晴天以及雪天。“Documents”文件夹下存有两个场景世界坐标系下的车辆的轨迹以及路端设备的位置,在同一场景下车辆的轨迹是相同的,即Scene1、Scene2、Scene3中的车辆轨迹真值相同,Scene4与Scene5中的车辆轨迹真值相同。具体的文件树状图见图9。
在评测数据集中(将于10月15日发布),将不包含车辆的全部真值轨迹,仅提供车辆世界坐标系下的初始坐标以及路端设备的坐标。评测数据集同时将涵盖雪天与数据残缺的特殊情形,用于测试选手定位算法的鲁棒性。
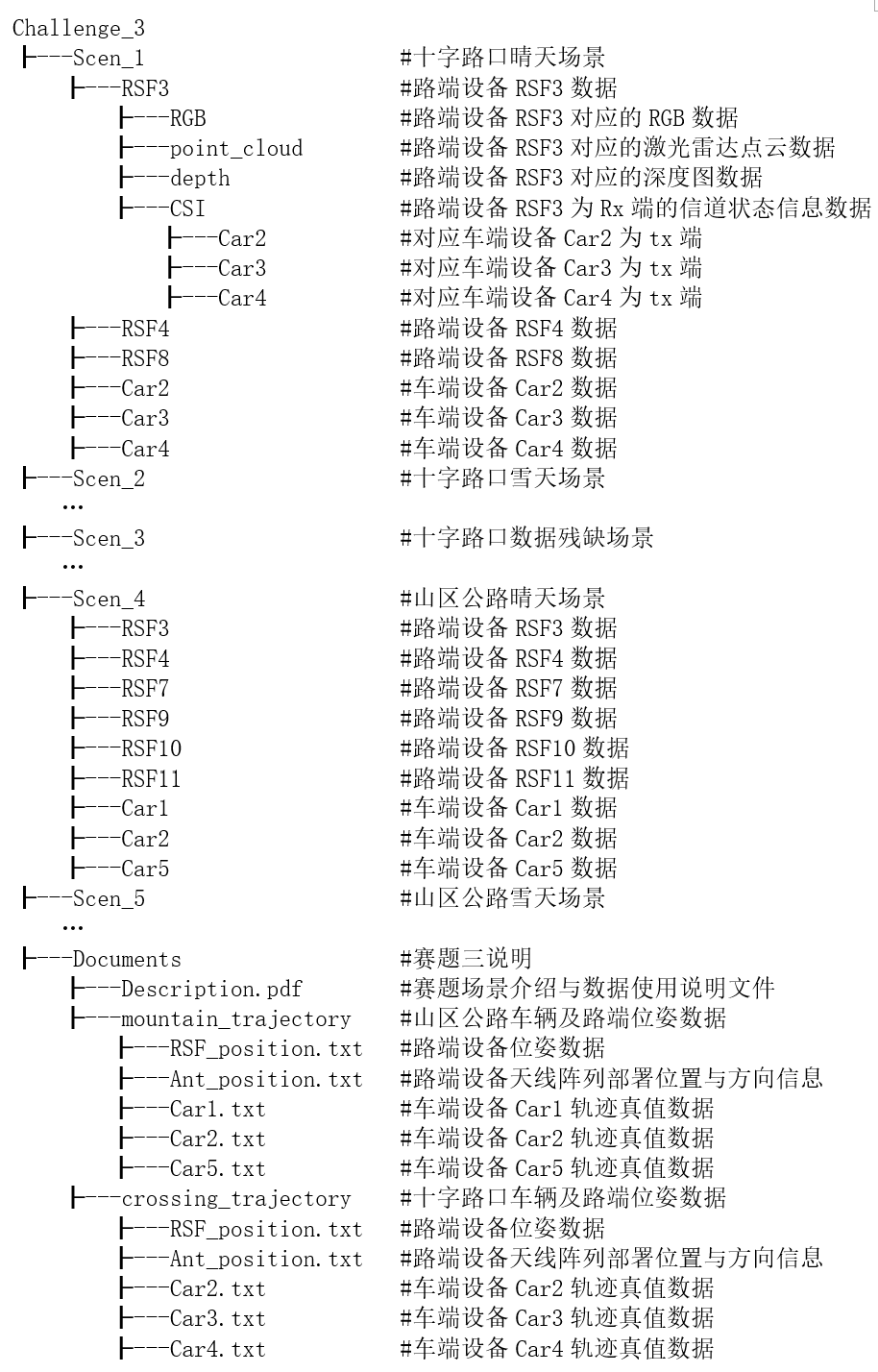
图9 赛题三文件夹目录
IVFC大赛已成功举办了十三届,大赛通过设置各类真实场景,测试和考察无人驾驶车辆的动态驾驶能力,通过建立赛道机制促进国内智能车技术的进步