(1) 赛题介绍
利用多车(地面车辆和空中出租车)多路端的多模态感知数据,实现城镇和郊区场景下路径损耗预测,有助于网络设计与轨迹优化。输入数据包含不同场景、不同车流量密度和不同频段的多车多路端感知数据,如图1-1所示,包括RGB图像、深度图像、激光雷达(LiDAR)点云数据和毫米波雷达点云数据,要求输出指定车端和路端的路径损耗。
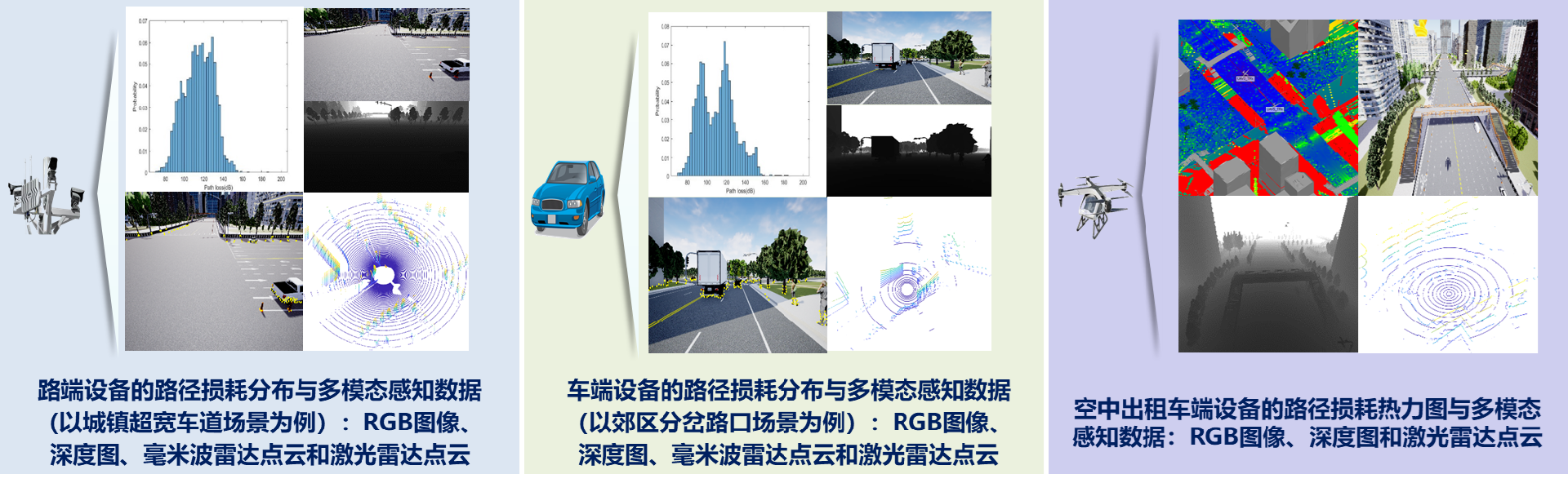
图1-1 路端/车端设备的路径损耗、RGB图像、深度图像、LiDAR点云数据和毫米波雷达点云数据
本赛题包含四个车联网场景条件(a-d)和一个低空经济场景条件(e),分别是(a)毫米波高车流量密度城镇超宽车道场景;(b)毫米波低车流量密度城镇超宽车道场景;(c)毫米波高车流量密度郊区分岔路口场景;(d)sub-6 GHz高车流量密度郊区分岔路口场景;(e)sub-6 GHz低车流量密度城镇超宽车道场景。
以下是本赛题任务输入输出的详细介绍。
1)车联网场景条件
i)任务输入:每种场景条件下的路端与地面车辆的多模态感知数据,即RGB相机的图像文件、深度相机图像文件、LiDAR点云文件和毫米波雷达的点云文件。
ii)任务输出:路径损耗分布信息,以场景条件_车端/路端编号_时刻_distribution.txt文件命名,如场景条件为毫米波高车流量密度城镇超宽车道,则场景条件命名为mmWave_highVTD_urban_vehicle,预测Car5在第20个时刻的路径损耗分布预测值,则其路径预测结果文件命名为mmWave_highVTD_urban_vehicle_Car5_snapshot20_distribution.txt,文件存储的详细格式请到“仿真结果提交”标签页查看。
2)低空经济场景条件
i)任务输入:每种场景条件下的路端与空中出租车的多模态感知数据,即RGB相机的图像文件、深度相机图像文件和LiDAR点云文件。
ii)任务输出:路径损耗图像信息,以场景条件_车端/路端编号_时刻_map.txt文件命名,如场景为sub-6 GHz低车流量密度城镇超宽车道,则场景条件命名为sub6_lowVTD_urban_AT,预测AT2在第20个时刻的路径损耗图像预测值,则其路径预测结果文件命名为sub6_lowVTD_urban_AT_AT2_snapshot20_map.txt,文件存储的详细格式请到“仿真结果提交”标签页查看。
(2)参赛指南
我们使用均方误差(Mean Squared Error, MSE)指标作为评分标准,评分细则请见下方。
选手应以txt格式上传结果,细则请见“仿真结果提交”标签页,请选手严格按照格式提交结果,否则无法参加测评!
请您遵守比赛规则,文明参赛!
请在测试结果提交截止时间之前提交您的结果!
(3)评分标准
评估预测的路径损耗精确度的指标为MSE:
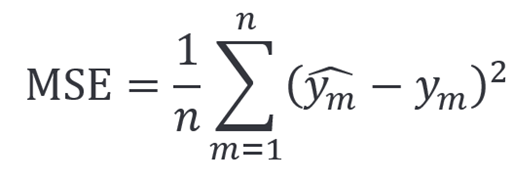
其中,n为样本数量,![]() 为特定场景条件和时刻下的特定设备的路径损耗预测值,
为特定场景条件和时刻下的特定设备的路径损耗预测值,![]() 为特定场景条件和时刻下的特定设备的路径损耗真值(ground truth)。
为特定场景条件和时刻下的特定设备的路径损耗真值(ground truth)。
车联网场景条件:![]() 为特定场景条件和时刻下的特定设备的路径损耗分布预测值(从0 dB到250 dB, 以1 dB为间隔),
为特定场景条件和时刻下的特定设备的路径损耗分布预测值(从0 dB到250 dB, 以1 dB为间隔),![]() 为特定场景条件和时刻下的特定设备的路径损耗分布真值(ground truth)
为特定场景条件和时刻下的特定设备的路径损耗分布真值(ground truth)
低空经济场景条件:![]() 为特定场景条件和时刻下的特定设备的路径损耗图像预测值(像素值范围0-255,对应路径损耗值0-255 dB,图像分辨率为71╳73),
为特定场景条件和时刻下的特定设备的路径损耗图像预测值(像素值范围0-255,对应路径损耗值0-255 dB,图像分辨率为71╳73),![]() 为特定场景条件和时刻下的特定设备的路径损耗图像真值(ground truth)
为特定场景条件和时刻下的特定设备的路径损耗图像真值(ground truth)
计算不同场景、不同车流量密度和不同频段下五个场景条件中的均方误差算数平均值(保留四位有效数字),并由低到高排序

(4)选手须知
1) 所提交结果应与所提交代码运行结果相符,严禁造假,违者将被取消参与排名资格;
2) 选手应基于所提供的数据集开发算法,禁止私自增加训练集;
3) 禁止使用测试集中的数据参与神经网络训练;
4) 应严格按照格式要求提交结果,格式不符者无法参与结果评测;
5) 请在截止日期前提交您的结果,过期提交将被视为无效!
(5) 数据说明:
本届复杂交通场景通信与感知算法挑战赛将发布面向车联网与低空经济的混合通信与多模态感知仿真数据集供选⼿使⽤。其中,低空经济场景为城镇(超宽车道)场景,车联网场景同时包含了城镇(超宽车道)场景和郊区(分岔路口)场景。
数据集利⽤了Wireless InSite仿真软件来采集⽆线通信信道数据。通信频段包含了毫⽶波频段(载波频率为28 GHz和带宽为2 GHz)和sub-6 GHz频段(载波频率为5.9 GHz和带宽20 MHz)。为了采集多模态感知数据,我们利⽤了3D游戏引擎Unreal Engine®、AirSim仿真软件和WaveFarer®仿真软件。其中,路端和车端均搭载了多模态感知设备,包括RGB相机、深度相机、激光雷达(LiDAR)和毫米波雷达。数据集中的⽆线通信信道数据和多模态感知数据均包含了多车和多路端信息,涵盖了高、低车流量密度和上升、平飞、下降三种“空中出租车”飞行轨迹。
文件格式说明:
1)RGB图像文件(png格式),深度图像文件(png格式),LiDAR点云文件(txt格式):每⾏为⼀个浮点数,每3⾏为⼀组,依次代表⼀个点的三维坐标(x,y,z),毫米波雷达点云文件(mat格式):每个mat点云包含N行点,每个点有三个元素,分别是距离、角度和功率。
2)路径损耗真值⽂件(txt格式)内容为指定发射端和接收端每个天线之间的路径损耗数据,单位为dB, 浮点值,第⼀⾏是发射端名称,其他为路径损耗数值。
3)数据的⽂件夹包含两个场景条件的数据,分别为车联网场景条件和低空经济场景条件,其中车联网场景条件下共包含了RGB,Depth_map,LiDAR,Radar和Pathloss五个⼦⽂件夹,每个文件夹里面包含了四种场景条件下的数据:(a)mmWave_highVTD_urban_vehicle,(b)mmWave_lowVTD_urban_vehicle,(c)mmWave_highVTD_suburban_vehicle,(d)sub6_highVTD_suburban_vehicle;低空经济场景条件下共包含RGB,Depth_map,LiDAR和Pathloss四个子文件夹,每个文件夹里面包含了一种场景条件下的数据:(e)sub6_lowVTD_urban_AT。文件目录树状图如图1-2和图1-3所示。
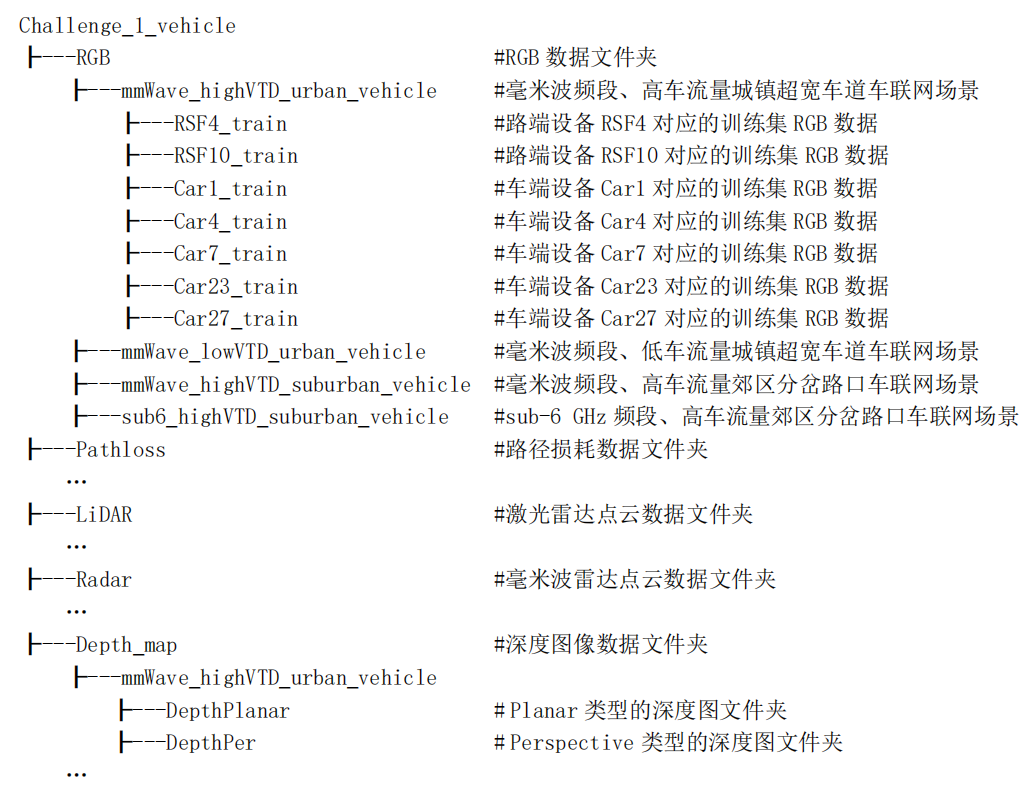
图1-2 赛题一车联网场景文件夹目录
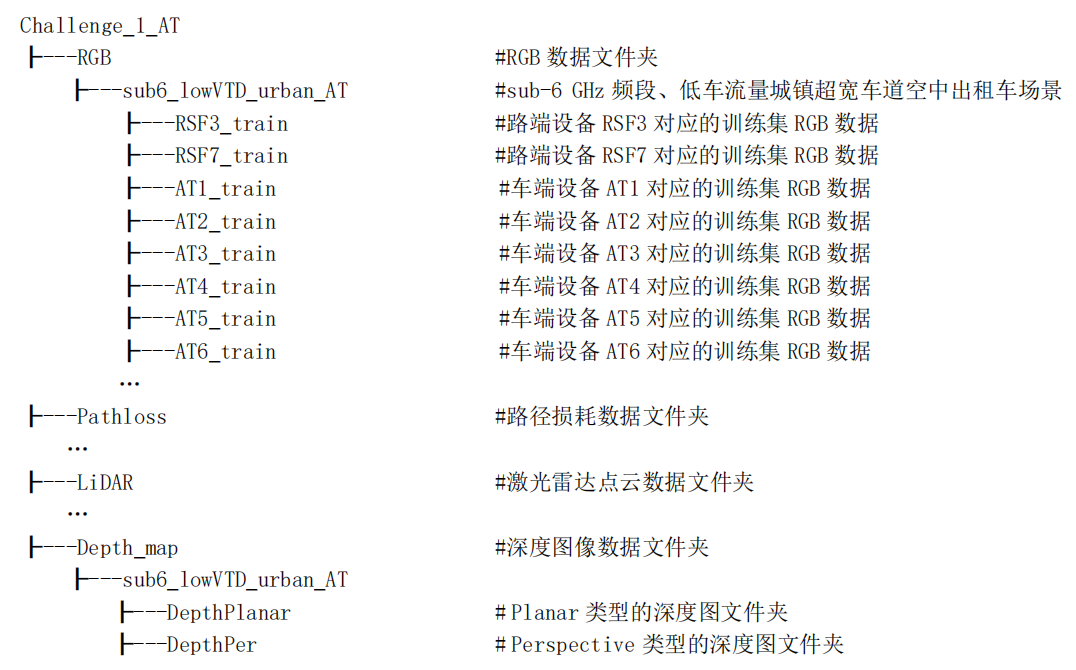
图1-3 赛题一空中出租车场景文件夹目录
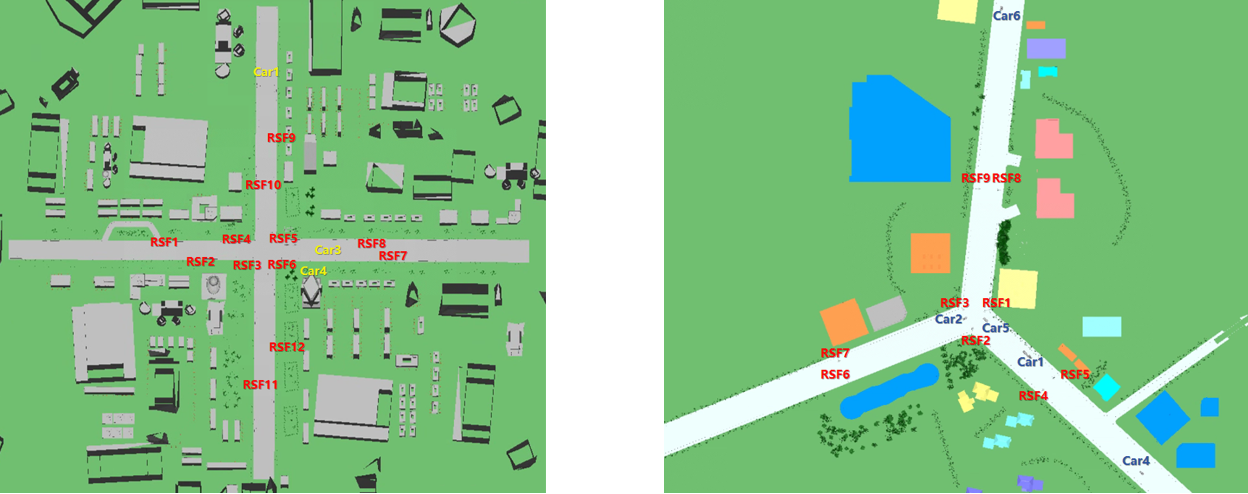
图1-4 赛题一车联网场景车辆和路端设备位置示意图(a)城镇超宽车道(b)郊区分岔路口
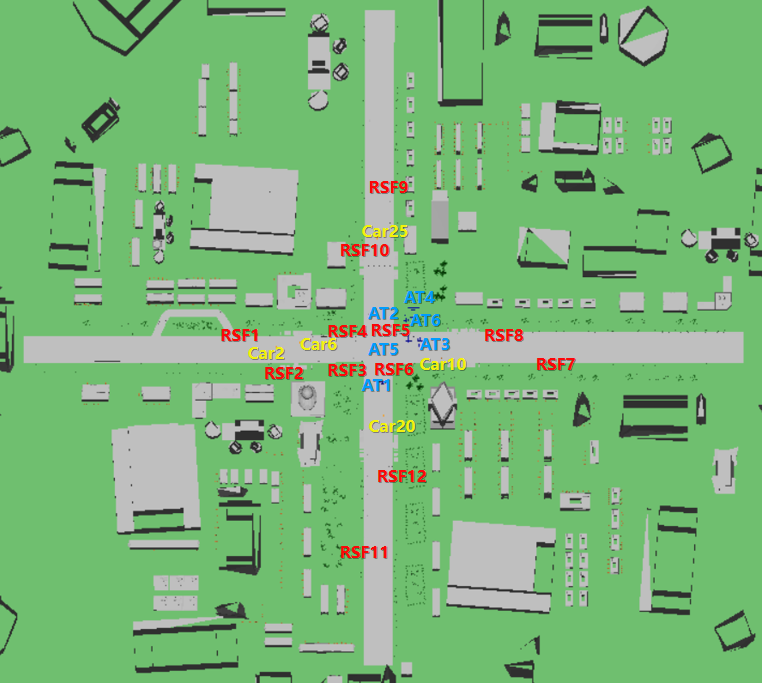
图1-5 赛题一城镇超宽车道空中出租车场景车辆、空中出租车和路端设备位置示意图
IVFC大赛已成功举办了十三届,大赛通过设置各类真实场景,测试和考察无人驾驶车辆的动态驾驶能力,通过建立赛道机制促进国内智能车技术的进步