(1)赛题介绍
本赛题要求选手利用多车多路端的多模态感知数据(包括LiDAR点云、RGB图像、深度图像和IMU数据)与车路射频信道信息,在网联智能车联网/低空经济复杂场景下,实现复杂场景、异常数据条件下高精度、鲁棒定位。如图3-1所示,输入数据包含车联网场景(分岔路口高车流量场景、超宽车道低车流量场景)和低空经济场景(包含空中出租车的超宽车道低车流量场景)的车端和路端多模态感知数据,输出为每种场景条件下目标车辆的位置与朝向的估计结果。值得注意的是,为了考验选手模型应对实际应用中的感知数据异常情况(比如意外遮挡、数据缺失)的适应能力,场景的训练集和测试集中包含了一定比例的数据缺失。
以下是本赛题任务输入输出的详细介绍。
任务输入:本赛题以不同场景为单位,每个场景下提供:
1) 该场景的基本信息说明文档,包含场景示意图、全部目标车辆初始时刻的位姿、路端RSU的位姿。用于选手进行开发的数据额外提供目标车辆每个时刻的位姿。
2) 车端的多模态感知数据,即深度相机图像文件、RGB相机图像文件、LiDAR的点云文件、IMU数据文件。
3) 路端RSU的多模态感知数据,即深度相机图像文件、RGB相机图像文件、LiDAR的点云文件,以及通信的信道状态信息。
任务输出:全部目标车辆全部时刻的位姿估计结果,以‘car_目标车编号.txt’文件命名。如目标车1的结果文件命名为‘car1.txt’,文件存储的详细格式请到“仿真结果提交”标签页查看。
本赛题所提供的数据集请到“资料下载--混合通信与多模态感知仿真数据集”标签页下载,在使用数据集前,请您阅读“资料下载--混合通信与多模态感知仿真数据集”标签页下关于数据集内容的详细说明。
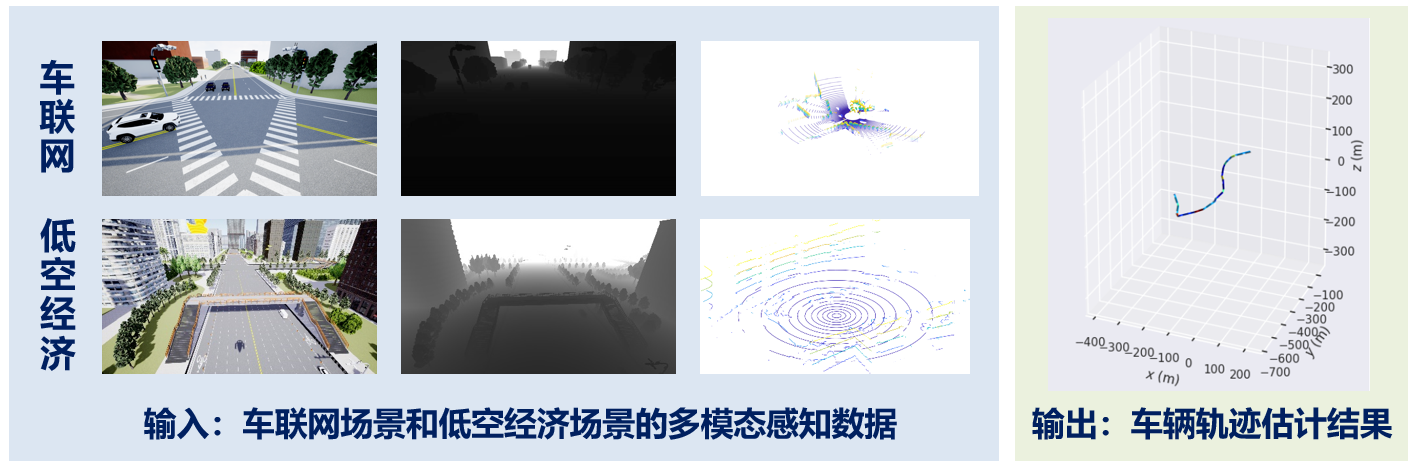
图3-1 赛题三输入输出示意图
(2)参赛指南
我们使用归一化平移误差E^T(百分比)与旋转误差E^R(°/m)作为评分标准,评分细则请见下方。
选手应以txt格式上传结果,细则请见“仿真结果提交”标签页,请选手严格按照格式提交结果,否则无法参加测评!
请您遵守比赛规则,文明参赛!
请在测试结果提交截止时间之前提交您的结果!
(3)评分标准
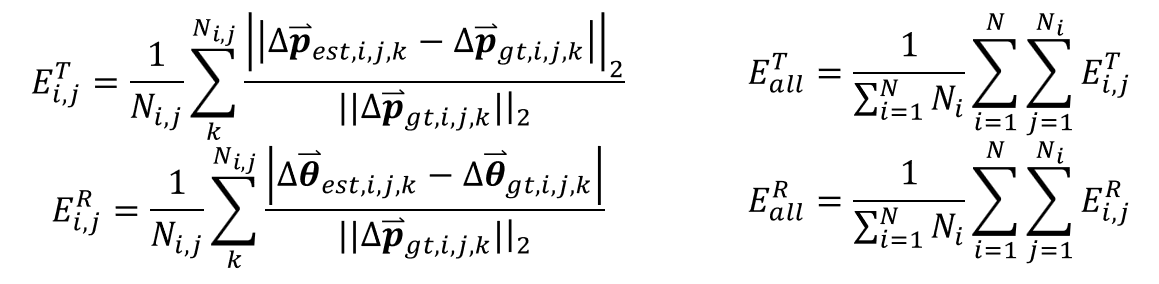
车联网/低空经济场景评估位姿估计精确度的指标为归一化平移误差E^T(百分比)与旋转误差E^R(°/m)
其中, E_(i,j)^T代表第i个场景第j个轨迹的归一化平移误差,E_all^T代表所有轨迹归一化平移误差的算术平均值, E_(i,j)^R代表第i个场景第j个轨迹的归一化旋转误差, E_all^R代表所有轨迹归一化旋转误差的算术平均值.
选手在本赛题中的最终得分为所有测评场景中E^T与E^R的加权平均值并由低到高排序:
![]()
(4)选手须知
1)所提交结果应与所提交代码运行结果相符,严禁造假,违者将被取消参与排名资格;
2)选手应基于所提供的数据集开发算法,禁止私自增加训练集;
3) 应严格按照格式要求提交结果,格式不符者无法参与结果评测;
4)请在截止日期前提交您的结果,过期提交将被视为无效!
(5)数据说明
本届复杂交通场景通信与感知算法挑战赛将发布面向车联网与低空经济的混合通信与多模态感知仿真数据集供选手使用。其中,低空经济场景为城镇(超宽车道)场景,车联网场景同时包含了城镇(超宽车道)场景和郊区(分岔路口)场景。
数据集利用了Wireless InSite仿真软件来采集无线通信信道数据。通信频段包含了毫米波频段(载波频率为28 GHz和带宽为2 GHz)和sub-6 GHz频段(载波频率为5.9 GHz和带宽20 MHz),特别地,赛题三的频段为28 GHz。为了采集多模态感知数据,我们利用了3D游戏引擎Unreal Engine®、AirSim仿真软件和WaveFarer仿真软件。其中,路端和车端均搭载了多模态感知设备,包括RGB相机、深度相机、激光雷达(LiDAR)和毫米波雷达。数据集中的无线通信信道数据和多模态感知数据均包含了多车和多路端信息,涵盖了高、低车流量密度和上升、平飞、下降三种“空中出租车”飞行轨迹。
文件格式说明:
1)RGB图像文件(png格式);
2)深度图像文件(png格式);
3)LiDAR点云文件(txt格式):行为一个浮点数,每3行为一组,依次代表一个点的三维坐标(x,y,z);
4)发射端和接收端之间的信道状态信息文件(mat格式):每个mat文件中有若干个cell,对应若干帧的信道状态信息。每一个cell 的内容为32行128列的信道复增益矩阵,每⾏依次对应Tx端1-32号天线, 每列依次对应Rx端1-128号天线;
5)IMU文件(txt格式):文件的不同行分别代表相应帧的IMU数据,IMU的运行频率为100Hz。每一行第1至第3列的数据分别为x轴加速度、y轴加速度和z轴加速度,单位均为m/(s^2);第4至6列的数据分别为绕x轴角速度、绕y轴角速度和绕z轴角速度,单位均为rad/s,第七列为IMU数据的帧数;需要特别注意的是,IMU的坐标系为机体系,而非世界坐标系;以及IMU的帧数是在100Hz频率下的帧数,而RGB图像、深度图、LiDAR点云数据的命名中的帧数是20Hz频率下的帧数。我们的所有设备均同时开始采集数据,因此IMU数据中的第“5x”帧对应于其他数据的第“x”帧。
6)轨迹真值文件(txt格式):该文件仅开发数据集包含,测评数据集不包含,内容为多帧的车辆位姿信息,按照时间顺序,每行依次代表一帧的车辆位姿信息。每一行的第1至3列分别为车辆在该帧的x、y和z坐标,单位为m;第4至6列分别为车辆在该帧的pitch、roll、yaw角度,单位为rad,第七列为帧号。
赛题三的数据集共分为三个场景⽂件夹,分别是分岔路口高车流量场景、超宽车道低车流量场景和包含空中出租车的超宽车道低车流量场景,每⼀场景⽂件夹下分别存有各个车辆以及路端的通信与多模态感知数据,第三个场景(包含空中出租车的超宽车道低车流量场景)还包括了空中出租车的通信与多模态感知数据(在子文件夹AT下)。每个场景都可能设置一定的传感器数据缺失,传感器数据残缺具体是指传感器数据会在某些时刻缺失⼀定的帧数,需要选⼿在设计算法时需要考虑应对此类问题的鲁棒性。“Documents”⽂件夹下存有三个场景世界坐标系下的车辆的轨迹以及路端设备的位置,文件目录树状图如图3-2所示。图3-3、图3-4和图3-5分别给出了分岔路口高车流量场景、超宽车道低车流量场景和包含空中出租车的超宽车道低车流量场景中车辆和路端设备的位置示意图。
在评测数据集中,将不包含车辆的全部真值轨迹,仅提供车辆世界坐标系下的初始坐标以及路端设备的坐标。评测数据集同时将涵盖数据残缺的特殊情形,⽤于测试选⼿定位算法的鲁棒性。
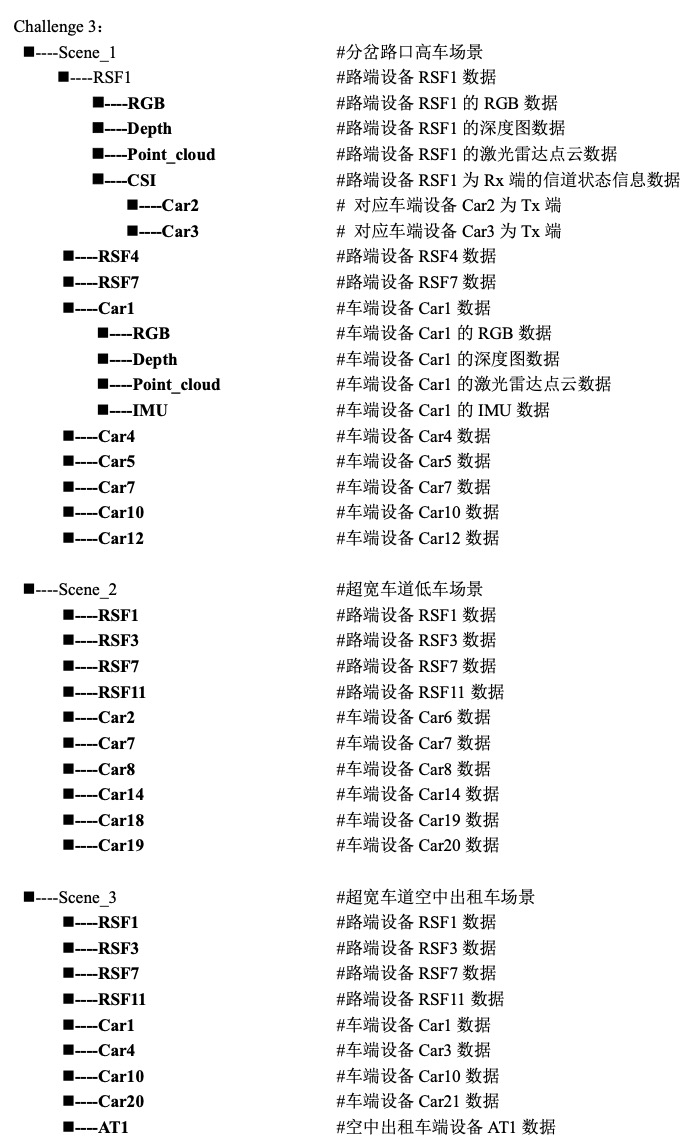
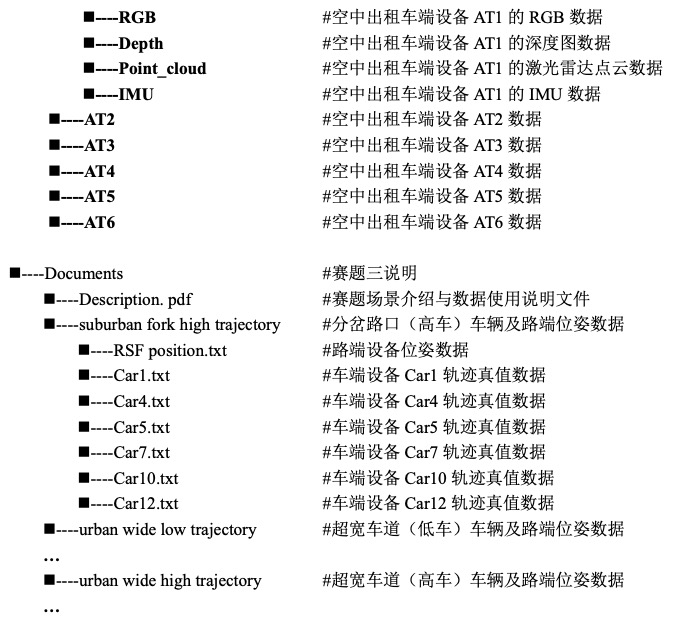
图3-2 赛题三文件夹目录
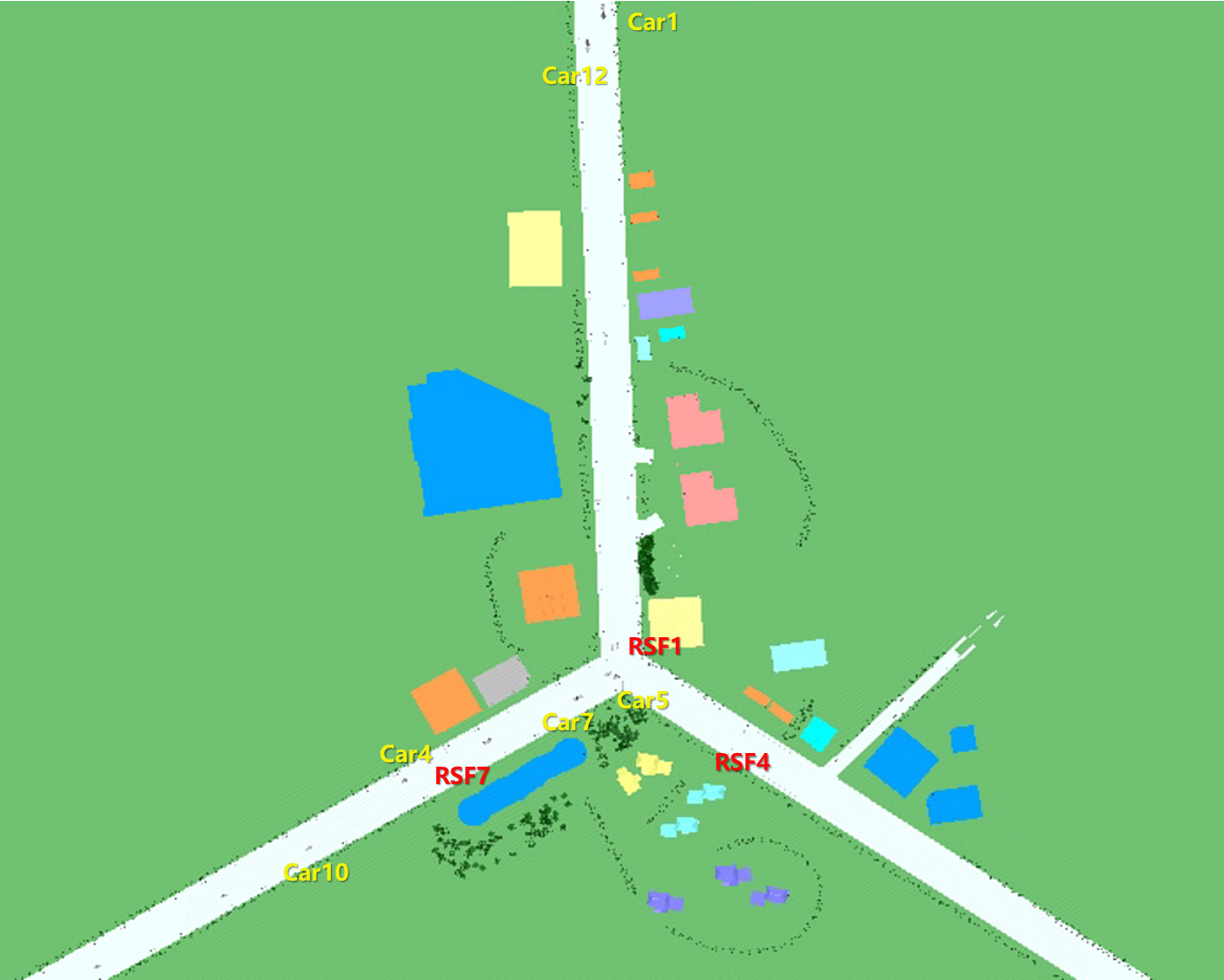
图3-3 赛题三分岔路口高车流量场景车辆和路端设备位置示意图
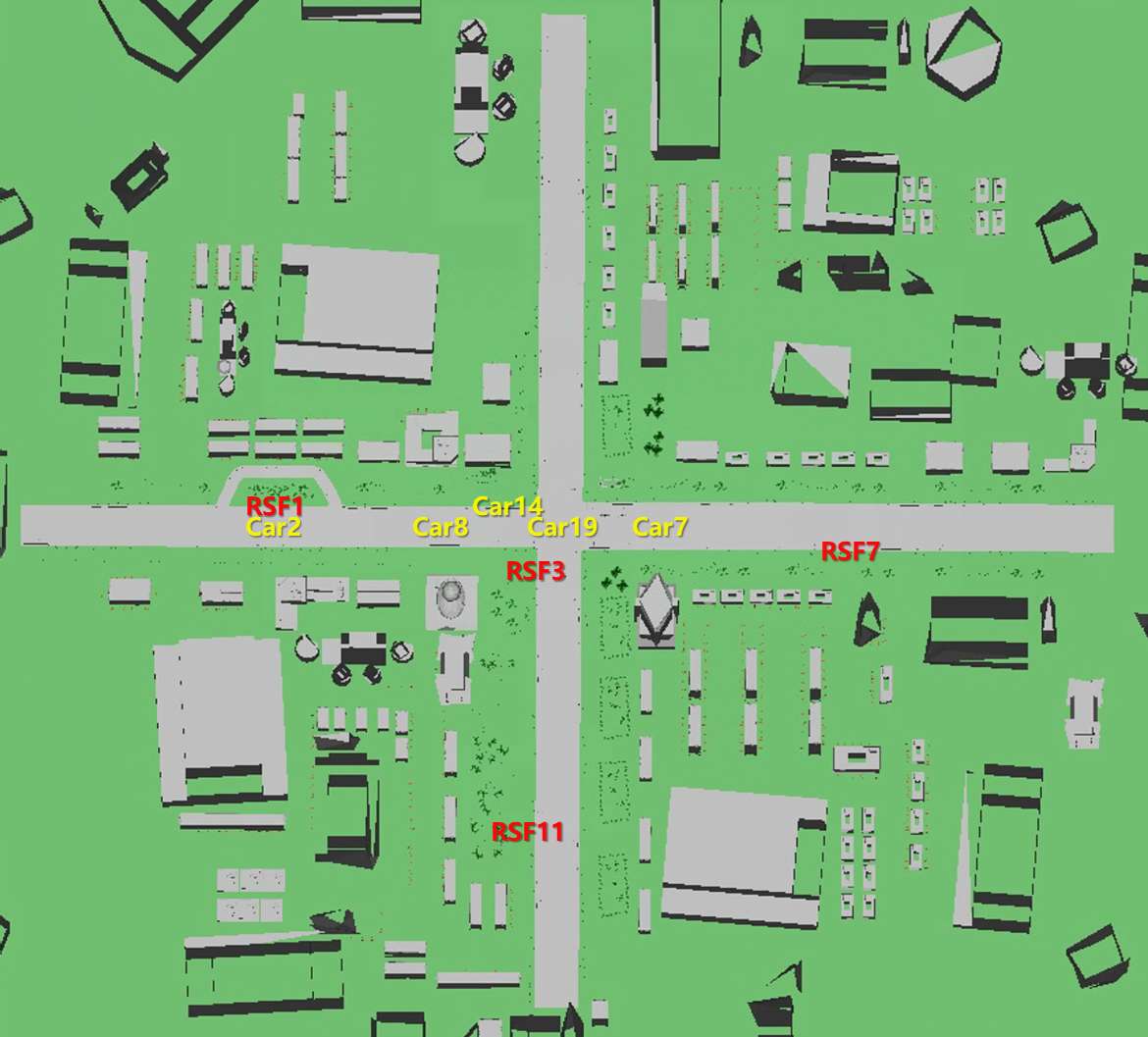
图3-4 赛题三超宽车道低车流量场景车辆和路端设备位置示意图
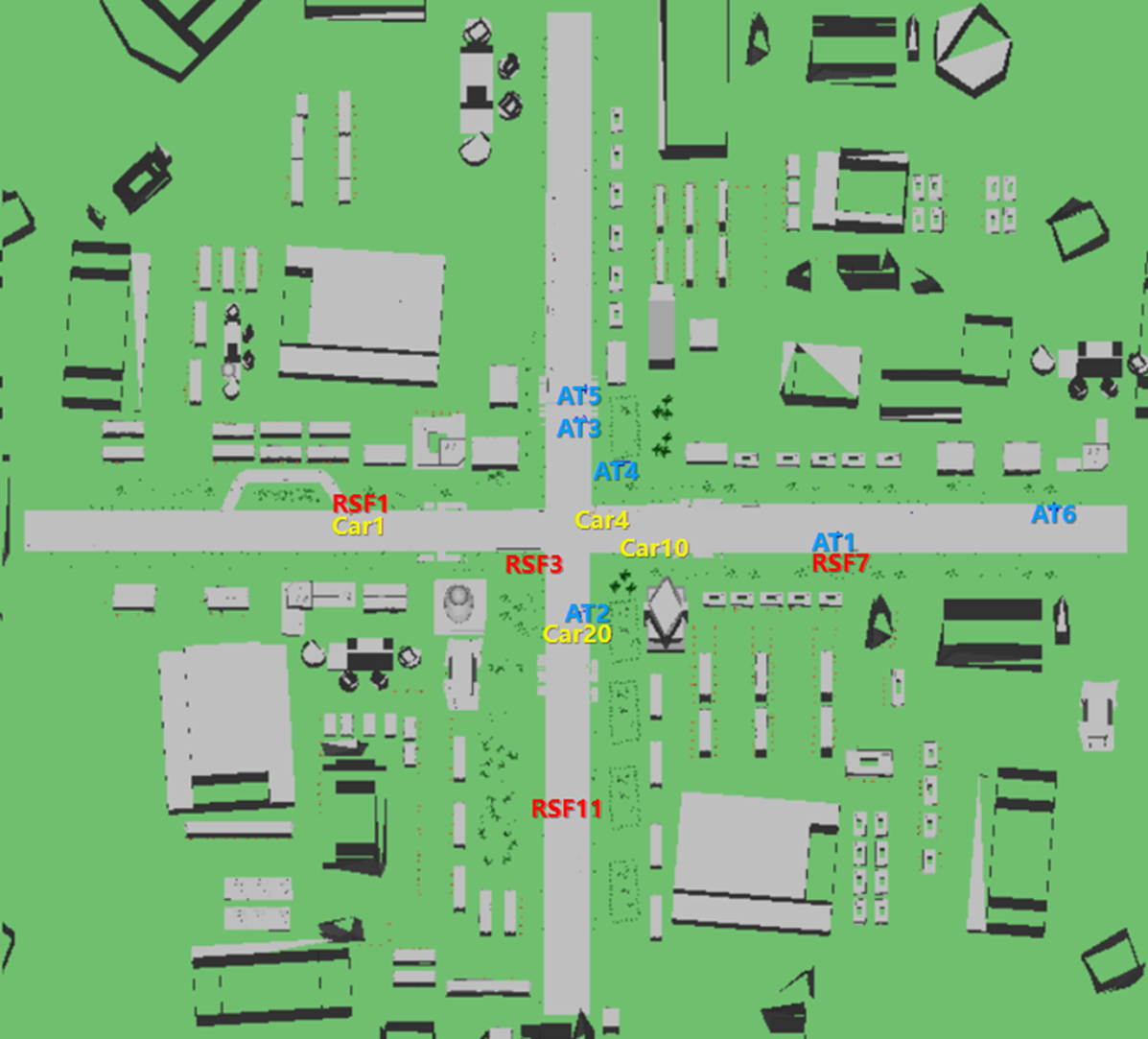
图3-5 赛题三包含空中出租车的超宽车道低车流量场景车辆和路端设备位置示意图
IVFC大赛已成功举办了十三届,大赛通过设置各类真实场景,测试和考察无人驾驶车辆的动态驾驶能力,通过建立赛道机制促进国内智能车技术的进步