当前位置:首页/场景&赛题/2024通感算法挑战赛
复杂交通场景通信与感知算法挑战赛
复杂交通场景通信与感知算法挑战赛分为5个赛题,详情请查看下面每个赛题的详细任务。
利用多车(地面车辆和空中出租车)多路端的多模态感知数据,实现城镇和郊区场景下路径损耗预测,有助于网络设计与轨迹优化。输入数据包含不同场景、不同车流量密度和不同频段的多车多路端感知数据,如图1-1所示,包括RGB图像、深度图像、激光雷达(LiDAR)点云数据和毫米波雷达点云数据,要求输出指定车端和路端的路径损耗。
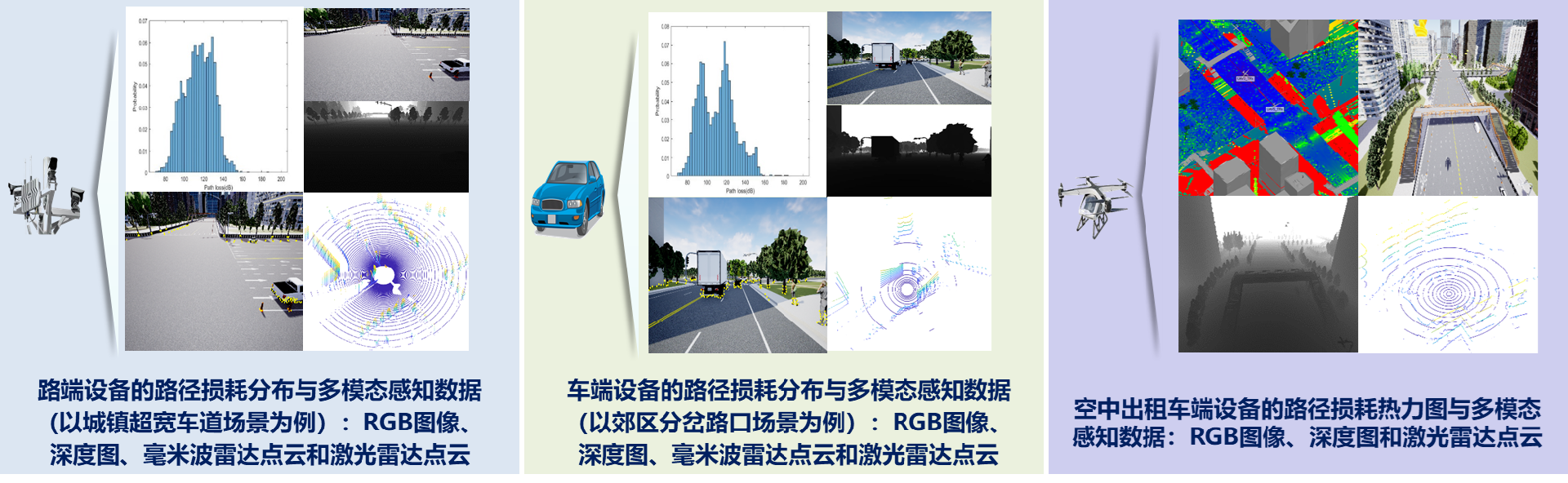
图1-1 路端/车端设备的路径损耗、RGB图像、深度图像、LiDAR点云数据和毫米波雷达点云数据
本赛题要求选手利用多模态感知信息的环境感知能力,在网联智能车联网/低空经济场景下,实现高精度、低通信开销的最佳波束选择。如图2-1所示,输入数据包含车联网场景(分岔路口高车流量场景、超宽车道低车流量场景、超宽车道高车流量场景)和低空经济场景(超宽车道低车流量密度)的多模态感知数据,输出为每种场景条件下接收信噪比最高的K个波束预测索引。本项任务将在车联网/低空经济两个场景中分别进行测试,选手的总分为两个场景测试得分的均值。值得注意的是,为了考验选手模型应对实际应用中的感知数据异常情况(比如意外遮挡、数据缺失)的适应能力,车联网场景的训练集和测试集中以一定比例向感知数据中引入意外遮挡、数据缺失和GPS定位误差三种数据异常处理。
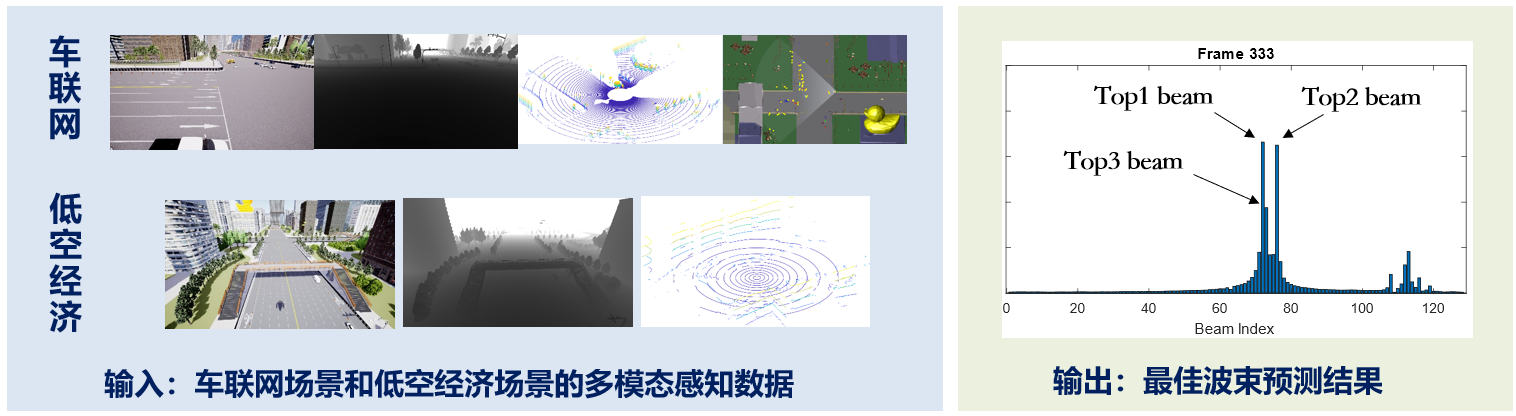
图2-1 赛题二输入输出示意图
本赛题要求选手利用多车多路端的多模态感知数据(包括LiDAR点云、RGB图像、深度图像和IMU数据)与车路射频信道信息,在网联智能车联网/低空经济复杂场景下,实现复杂场景、异常数据条件下高精度、鲁棒定位。如图3-1所示,输入数据包含车联网场景(分岔路口高车流量场景、超宽车道低车流量场景)和低空经济场景(包含空中出租车的超宽车道低车流量场景)的车端和路端多模态感知数据,输出为每种场景条件下目标车辆的位置与朝向的估计结果。值得注意的是,为了考验选手模型应对实际应用中的感知数据异常情况(比如意外遮挡、数据缺失)的适应能力,场景的训练集和测试集中包含了一定比例的数据缺失。
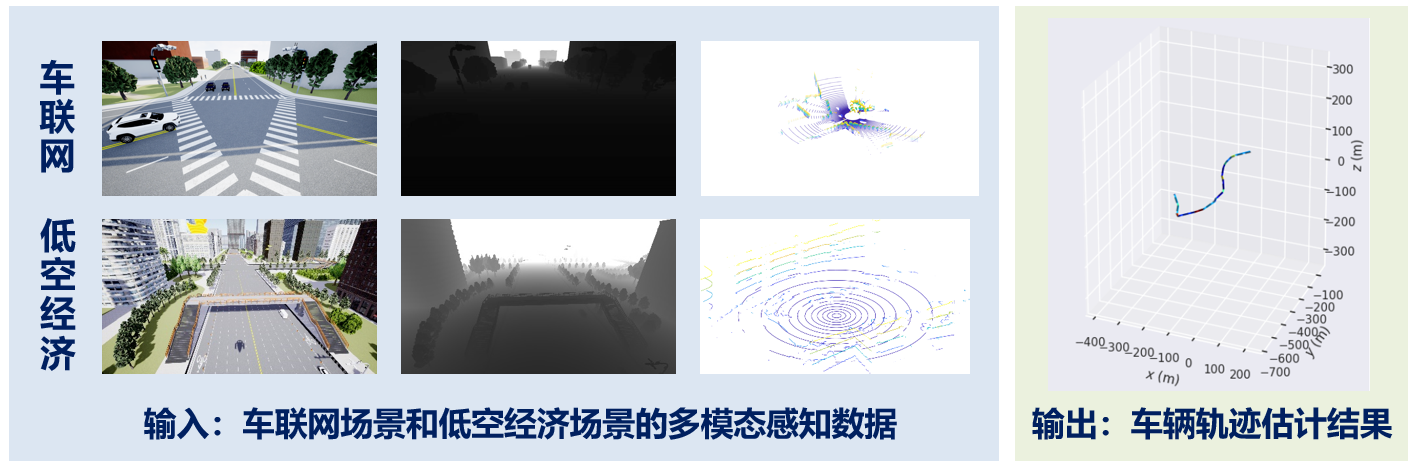
图3-1 赛题三输入输出示意图
本赛题要求参赛队伍根据不同事故类型下的行车环境多模态事故视频理解数据,包括RGB图像、文本信息,交通参与者位置信息,实现在固定事故视频长度条件下(帧率为30,视频时长5s)的交通事故风险预测。即要求![]() 大于规定的事故风险阈值(通常设置为0.5)的情况下达到最大,即距离事故起始的时间TTA(Time-to-Accident)最大。同时本赛题提供交通参与者的位置信息,可有助于发现事故的风险区域。
大于规定的事故风险阈值(通常设置为0.5)的情况下达到最大,即距离事故起始的时间TTA(Time-to-Accident)最大。同时本赛题提供交通参与者的位置信息,可有助于发现事故的风险区域。
本赛道从全自动驾驶技术的需求侧出发,开设了在封闭停车场内虚实结合的自主代客泊车赛项,模拟“最后一公里”内智能汽车从公开道路进入未建图封闭住宅/商业区停车场的常见生活案例,积极探索乘客自然语言指令驱动的自动驾驶新范式,鼓励通过大语言模型、计算机视觉大模型和通用智能体等人工智能创新克服现有技术局限,实现精细化、个性化的无缝自动驾驶服务。
如遇到问题,请联系:黄子蔚 ziweihuang@pku.edu.cn(赛题一);张浩天 haotianzhang@stu.pku.edu.cn(赛题二);李思江 pkulsj@pku.edu.cn(赛题三);李磊磊 670160532@qq.com(赛题四);胡金城 demanddriving@outlook.com(赛题五)
组织单位
主办单位:国家自然科学基金委员会信息科学部、中国自动化学会
承办单位:常熟市人民政府
协办单位:中国(常熟)智能车综合技术研发与测试中心
IVFC大赛已成功举办了十三届,大赛通过设置各类真实场景,测试和考察无人驾驶车辆的动态驾驶能力,通过建立赛道机制促进国内智能车技术的进步